Hi, I am trying to connect my YDLIDAR X4 via ros2 on my raspberry pi4, my question is if it is possible to do that without my raspberry dying.
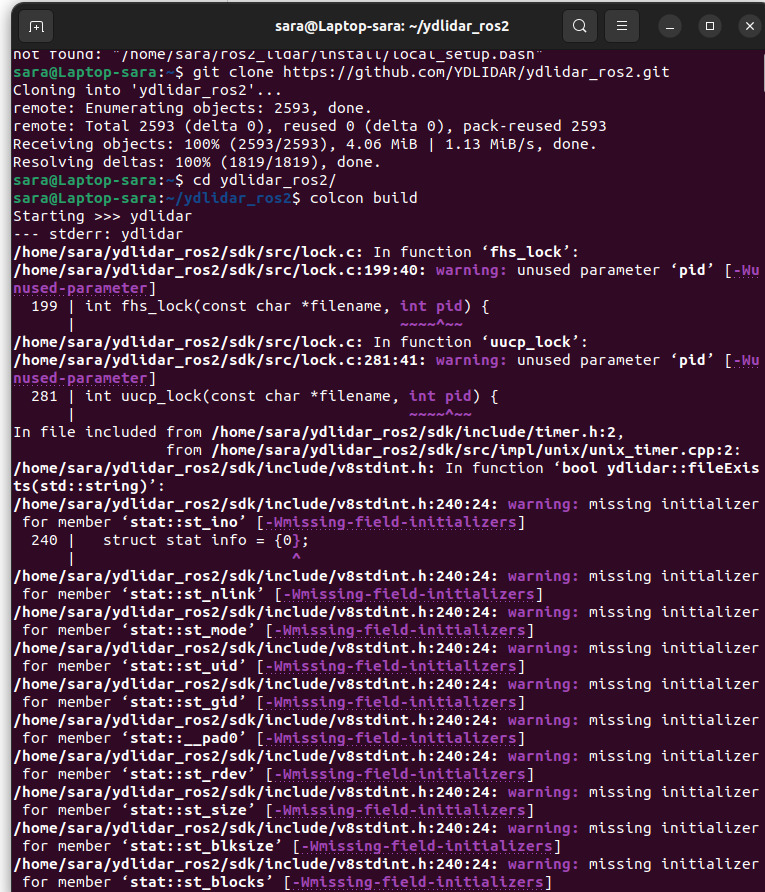
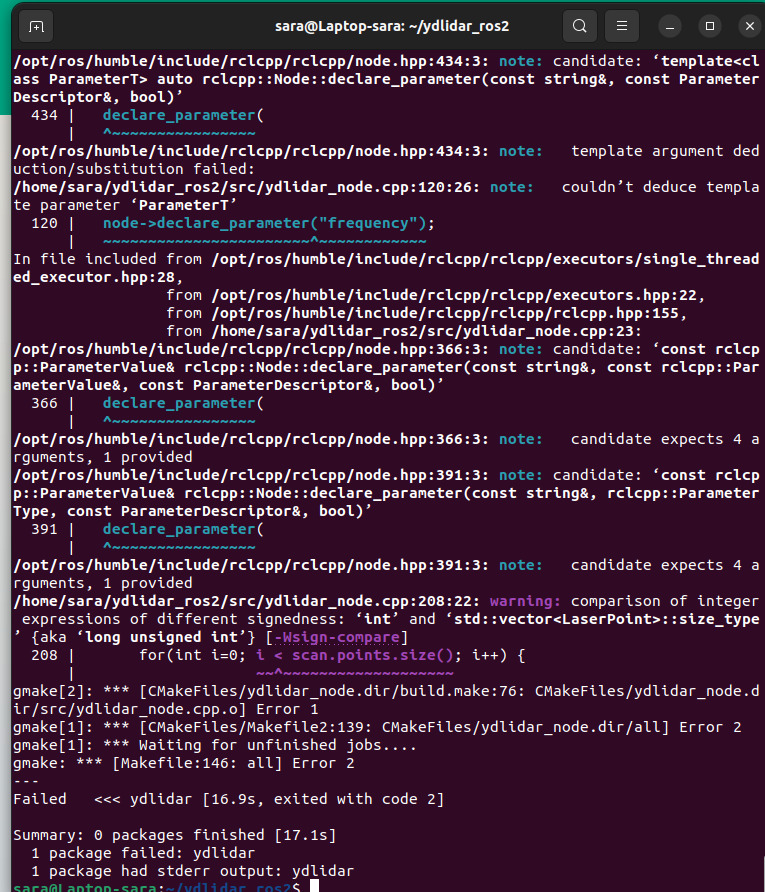
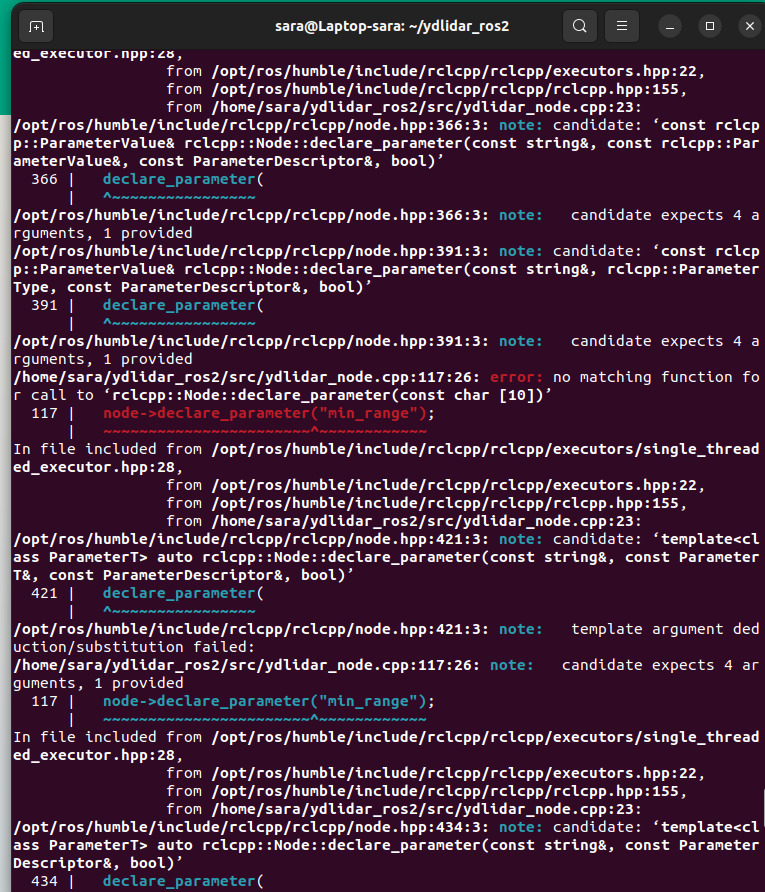
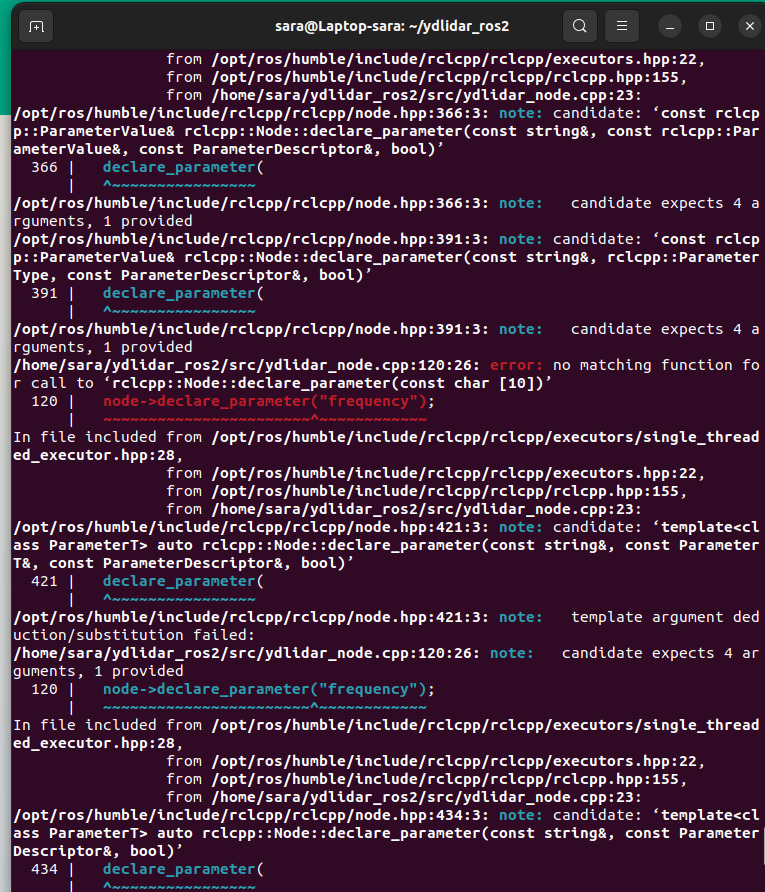
Another question is that I was cloning this git hub GitHub - YDLIDAR/ydlidar_ros2: ydlidar ros2 package but I get this error when I give it colcon build: