Hello.
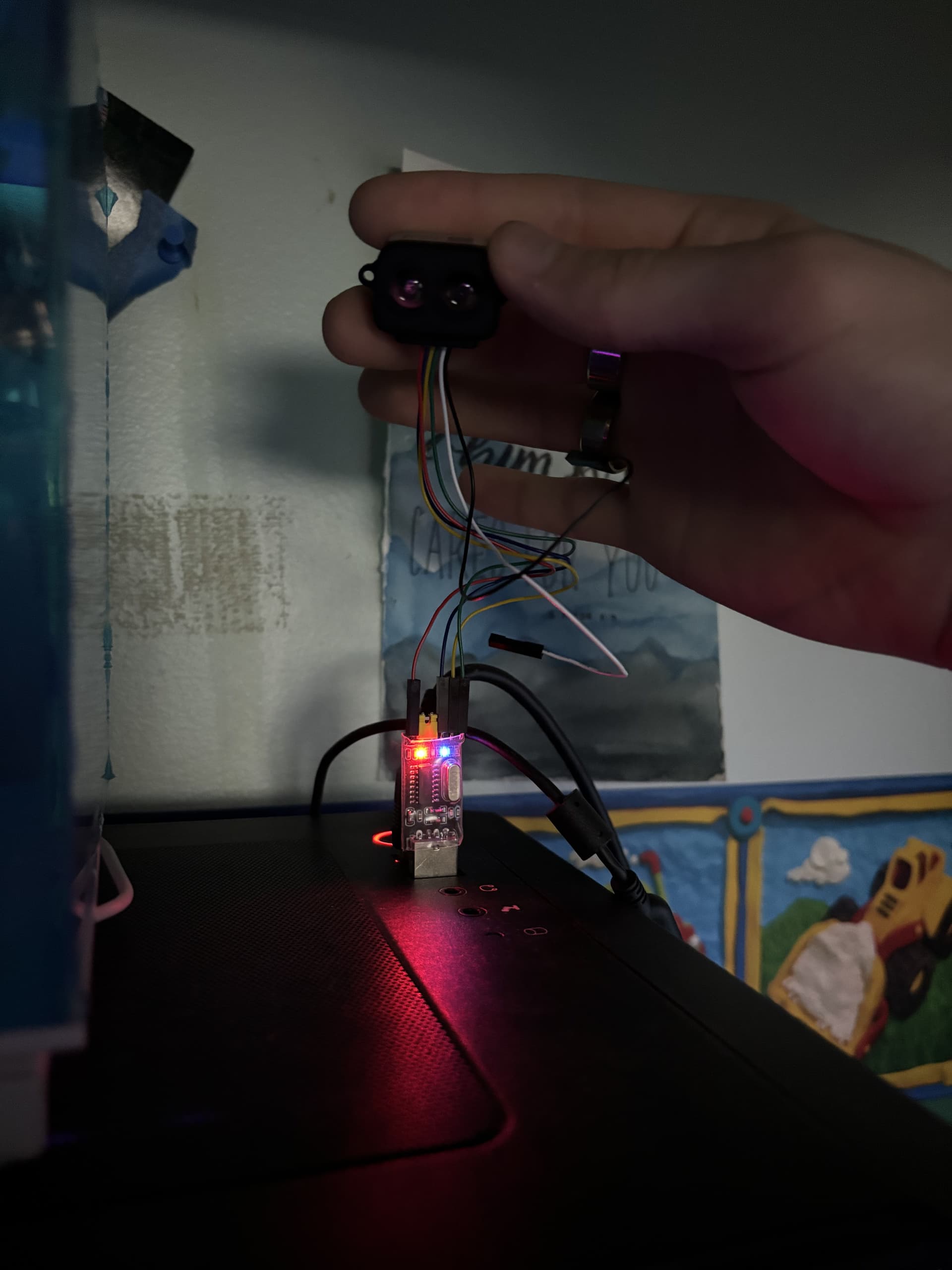
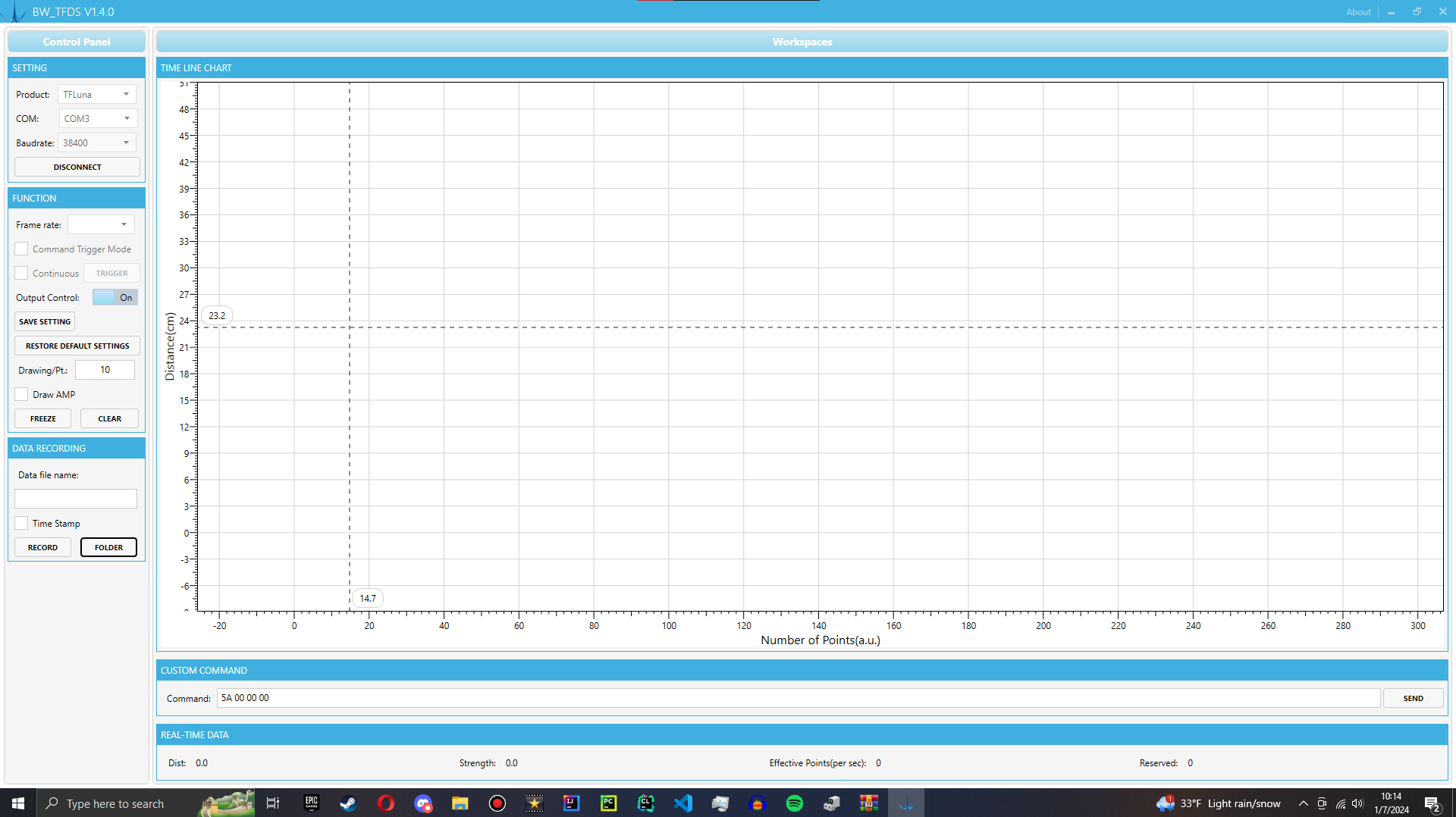
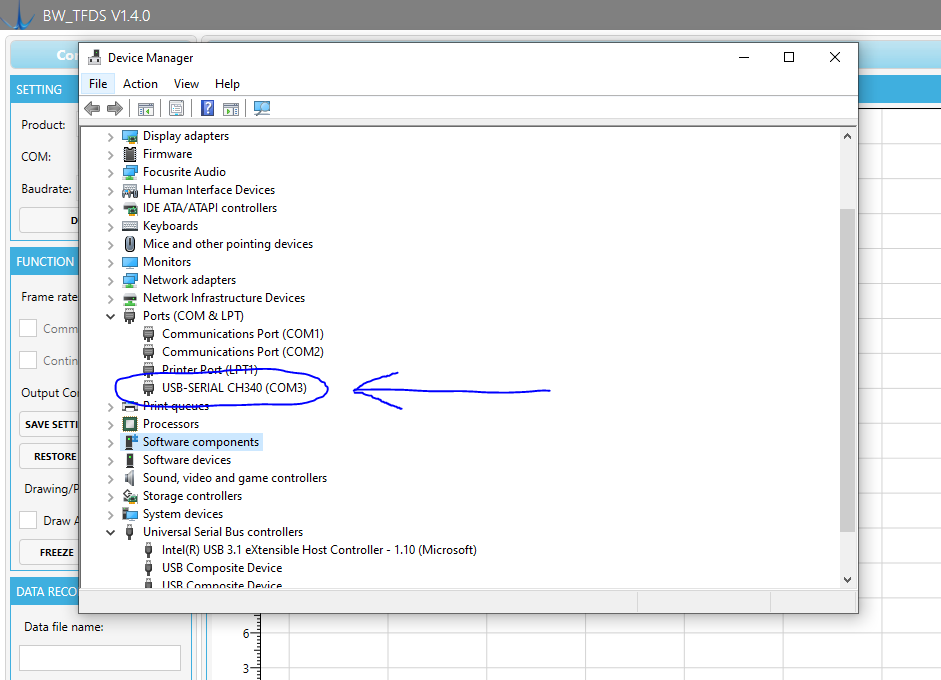
I have received the TF-Luna and have connected it to the USB included correctly (Picture 1). I then downloaded the WINCC_TF.exe file and ran the program to read the depth values (Picture 2). However, I cannot seem to access the values or get the camera to work? I know my computer is detecting the USB, as it is visible in the device manager (Picture 3). ALSO, how can I use this camera, if possible, in a personal code application AND access its values in real time? Many thanks!
Thank you for your reply! I did so and followed the documentation, but had to modify a couple things, such as the serial port; instead of /dev/ttyAMA0 which was used in the documentation, I found that only /dev/ttyS0 allowed the code to run without errors.
Furthermore, my problem I am writing about now, is that it seems my camera is not processing the counter variable properly. The code provided in the documentation has an if statement at the beginning of the read_data() function which checks the condition if counter > 8:.
After a long silence from my program while running, I placed a print() statement before the condition to print what my program’s ‘counter’ value was, to which I saw it was ZERO. I am not sure why this is happening; I even tried some other GitHub code, to which I was met with the same ZERO.
Attached is a video I took of my camera setup and program. Any help is appreciated! Video (Youtube link)