Hello,
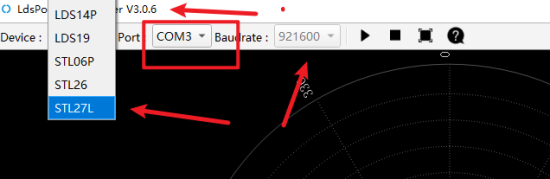
I recently bought the FHLD19-Plus from Youyeetoo on amazon, and when it arrived it has the STL-27L sticker label on it from LDRobot. I have followed exactly the instructions outlined in the WIKI and README for ROS2 Humble and run into the following issue “lidar communication is abnormal”. I have also tried the STL-27L repository which did not work. I have verified that is is /dev/ttyUSB0 and the launch file parameters match. I have also verified that data is transferring with minicom and made sure the proper port and baud were set in the parameters. Any help is appreciated! It may be worth nothing that their windows application also did not display any data for me despite having the driver installed and adapter recognized. There is also 1 segment of the little blue circle on top that is not lit (not sure if that’s normal).
ERROR CODE BELOW :
user@VirtualMachine3:~/lidar_ros2_ws$ ros2 launch ldlidar viewer_stl27l.launch.py
[INFO] [launch]: All log files can be found below /home/trace/.ros/log/2025-01-22-18-35-15-314576-VirtualMachine3-5950
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ldlidar-1]: process started with pid [5951]
[INFO] [static_transform_publisher-2]: process started with pid [5953]
[INFO] [rviz2-3]: process started with pid [5955]
[static_transform_publisher-2] [WARN] [1737592515.421684072] []: Old-style arguments are deprecated; see --help for new-style arguments
[ldlidar-1] [INFO] [1737592515.438288937] [STL27L]: LDLiDAR SDK Pack Version is: v3.0.5
[ldlidar-1] [INFO] [1737592515.438434188] [STL27L]: <product_name>: LDLiDAR_STL27L
[ldlidar-1] [INFO] [1737592515.438449869] [STL27L]: <topic_name>: scan
[ldlidar-1] [INFO] [1737592515.438460547] [STL27L]: <frame_id>: base_laser
[ldlidar-1] [INFO] [1737592515.438470457] [STL27L]: <enable_serial_or_network_communication>: Enable serial
[ldlidar-1] [INFO] [1737592515.438480822] [STL27L]: <port_name>: /dev/ttyUSB0
[ldlidar-1] [INFO] [1737592515.438490996] [STL27L]: <port_baudrate>: 921600
[ldlidar-1] [INFO] [1737592515.438501064] [STL27L]: <server_ip>: 192.168.1.200
[ldlidar-1] [INFO] [1737592515.438511589] [STL27L]: <server_port>: 2000
[ldlidar-1] [INFO] [1737592515.438521470] [STL27L]: <laser_scan_dir>: Counterclockwise
[ldlidar-1] [INFO] [1737592515.438531744] [STL27L]: <enable_angle_crop_func>: false
[ldlidar-1] [INFO] [1737592515.438545209] [STL27L]: <angle_crop_min>: 135.000000
[ldlidar-1] [INFO] [1737592515.438562508] [STL27L]: <angle_crop_max>: 225.000000
[ldlidar-1] [INFO] [1737592515.438573910] [STL27L]: <measure_point_freq>: 21600
[static_transform_publisher-2] [INFO] [1737592515.447722976] [base_link_to_base_laser_stl27l]: Spinning until stopped - publishing transform
[static_transform_publisher-2] translation: (‘0.000000’, ‘0.000000’, ‘0.180000’)
[static_transform_publisher-2] rotation: (‘0.000000’, ‘0.000000’, ‘0.000000’, ‘1.000000’)
[static_transform_publisher-2] from ‘base_link’ to ‘base_laser’
[ldlidar-1] [INFO] [1737592515.482229151] [STL27L]: ldlidar node start is success
[rviz2-3] [INFO] [1737592515.832420247] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [INFO] [1737592515.832506634] [rviz2]: OpenGl version: 4.5 (GLSL 4.5)
[rviz2-3] [INFO] [1737592515.928479459] [rviz2]: Stereo is NOT SUPPORTED
[ldlidar-1] [ERROR] [1737592515.983071792] [STL27L]: ldlidar communication is abnormal.
[ldlidar-1] [LDS][INFO][1737592515.482098688][Actual BaudRate reported:921600]
[ERROR] [ldlidar-1]: process has died [pid 5951, exit code 1, cmd ‘/home/trace/lidar_ros2_ws/install/ldlidar/lib/ldlidar/ldlidar --ros-args -r __node:=STL27L --params-file /tmp/launch_params_0nr2qla3 --params-file /tmp/launch_params_0gnmik3r --params-file /tmp/launch_params_rngyd7l8 --params-file /tmp/launch_params_7hms0fmv --params-file /tmp/launch_params_2wasfqna --params-file /tmp/launch_params_liyqkacs --params-file /tmp/launch_params_cu28jf7e --params-file /tmp/launch_params_yj2bcjjq --params-file /tmp/launch_params__d3r6bvf --params-file /tmp/launch_params_vvmivnoa --params-file /tmp/launch_params_lof1lrfg --params-file /tmp/launch_params_9pqti3rh --params-file /tmp/launch_params_za8htjwb’].
[INFO] [rviz2-3]: process has finished cleanly [pid 5955]
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[static_transform_publisher-2] [INFO] [1737592524.747662833] [rclcpp]: signal_handler(signum=2)
[INFO] [static_transform_publisher-2]: process has finished cleanly [pid 5953]