I recently purchased the RPLIDAR S2 for sensor applications. I have successfully connected it to Slamtec RoboStudio and captured the room’s exterior appearance.
I am reaching out to seek guidance on achieving the following two objectives:
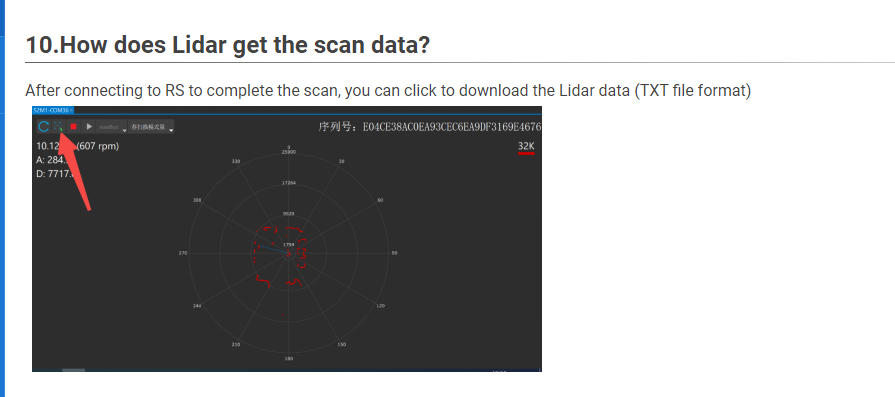
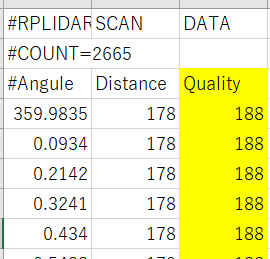
Obtaining point cloud data in text format.
Acquiring reliability data in text format.
Could you kindly provide instructions or insights on the methods to achieve the above-mentioned tasks? Your assistance on this matter would be highly appreciated.
I am reaching out to seek clarification on the following aspects related to the [quality]:
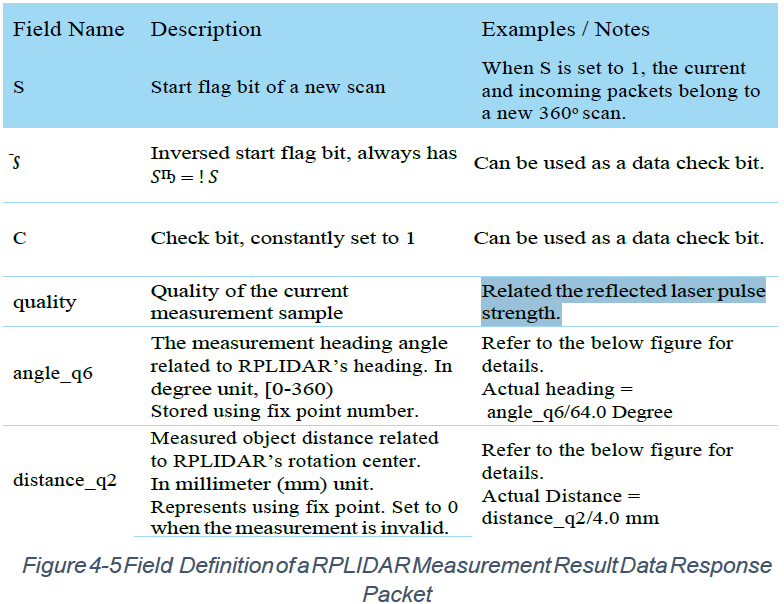
Understanding Quality Metric:
I would appreciate it if you could provide insights into what the “Quality” metric signifies. What parameters does it measure, and how should I interpret the numerical values associated with it?
Reliable Range for Quality:
I am keen to understand the reliable range for the “Quality” metric. Could you please guide me on the acceptable values or the range within which the quality should ideally fall for dependable data?
Your assistance and clarification on these matters would be greatly appreciated. Thank you for your time and consideration.
I don’t quite understand what you’re inquiring about. Maybe it’s the ranging principle of the S2?
The RPLIDAR S2 is based on laser flight-of-time (TOF) ranging principle and adopts the high-speed laser acquisition and processing hardware developed by SLAMTEC. The system ranges more than 32000 times per second. During every ranging process, the RPLIDAR emits modulated infrared laser signal and the laser signal is then reflected by the object to be detected. The returning signal is then sampled by laser acquisition system in RPLIDAR and the processor embedded in RPLIDAR starts processing the sample data and outputs distance Range Scanner Core value and angle value between object and RPLIDAR S2 via communication interface.