Happy New Year everyone!
I have tested my RPLidar with Slamtec RoboStudio and it is scanning and displaying the data correctly.
I have connected my RPLidar like this to my Arduino Mega 2560 board:
Blue > pin 2
Black > GND
Green > 19RX1
Yellow > 18TX1
Red > 5V

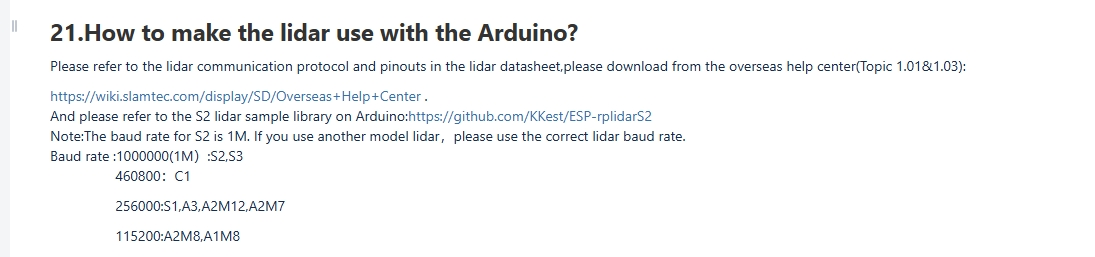
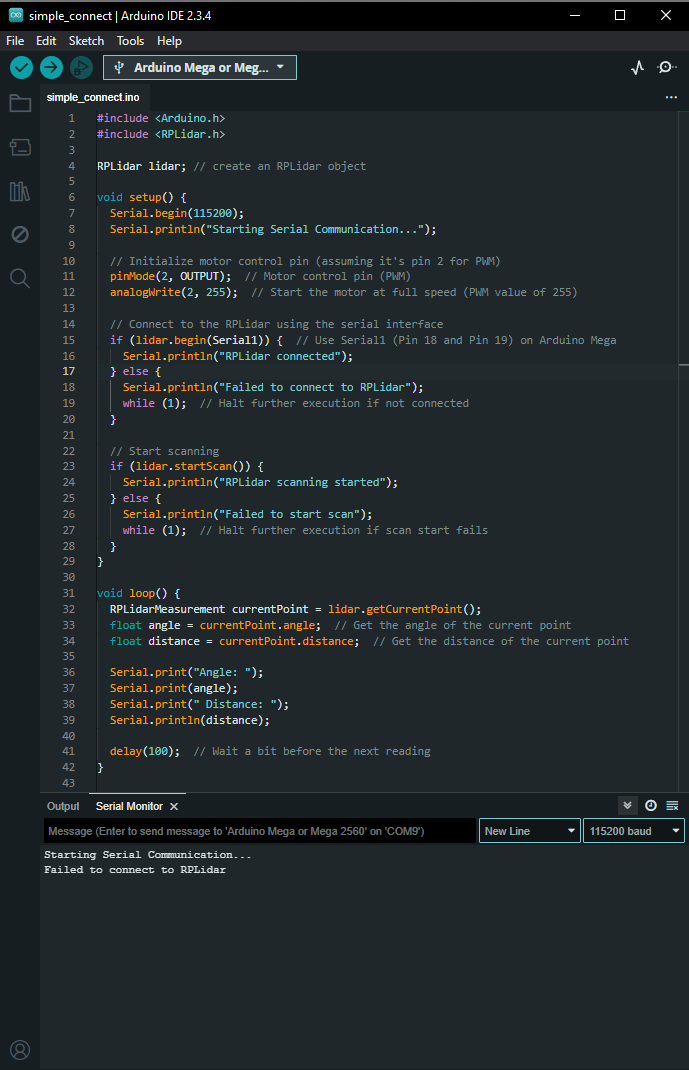
I downloaded the library zip from GitHub - robopeak/rplidar_arduino: RoboPeak RPLIDAR driver for Arduino and Arduino-compatible devices and included it in Arduino IDE. The baud is set to 115200 in the code and in the Arduino IDE:
#include <Arduino.h>
#include <RPLidar.h>
RPLidar lidar; // create an RPLidar object
void setup() {
Serial.begin(115200);
Serial.println("Starting Serial Communication...");
// Initialize motor control pin (assuming it's pin 2 for PWM)
pinMode(2, OUTPUT); // Motor control pin (PWM)
analogWrite(2, 255); // Start the motor at full speed (PWM value of 255)
// Connect to the RPLidar using the serial interface
if (lidar.begin(Serial1)) { // Use Serial1 (Pin 18 and Pin 19) on Arduino Mega
Serial.println("RPLidar connected");
} else {
Serial.println("Failed to connect to RPLidar");
while (1); // Halt further execution if not connected
}
// Start scanning
if (lidar.startScan()) {
Serial.println("RPLidar scanning started");
} else {
Serial.println("Failed to start scan");
while (1); // Halt further execution if scan start fails
}
}
void loop() {
RPLidarMeasurement currentPoint = lidar.getCurrentPoint();
float angle = currentPoint.angle; // Get the angle of the current point
float distance = currentPoint.distance; // Get the distance of the current point
Serial.print("Angle: ");
Serial.print(angle);
Serial.print(" Distance: ");
Serial.println(distance);
delay(100); // Wait a bit before the next reading
}
which returns “Failed to connect to RPLidar”.
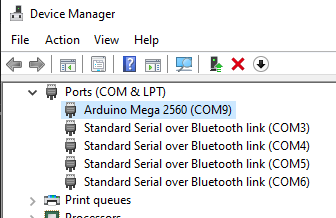
I have selected Arduino Mega Board as you can see in this screenshot:
using COM 9:
Somewhere I read to use Baud 256000, but when I put that in Serial.begin(256000) then is logs gibberish: “�n�36b}a>ihH��n�3Vba^iV+Hm’h]�” and serial monitor does not have the 256000 option.
Does anyone know what I am missing?