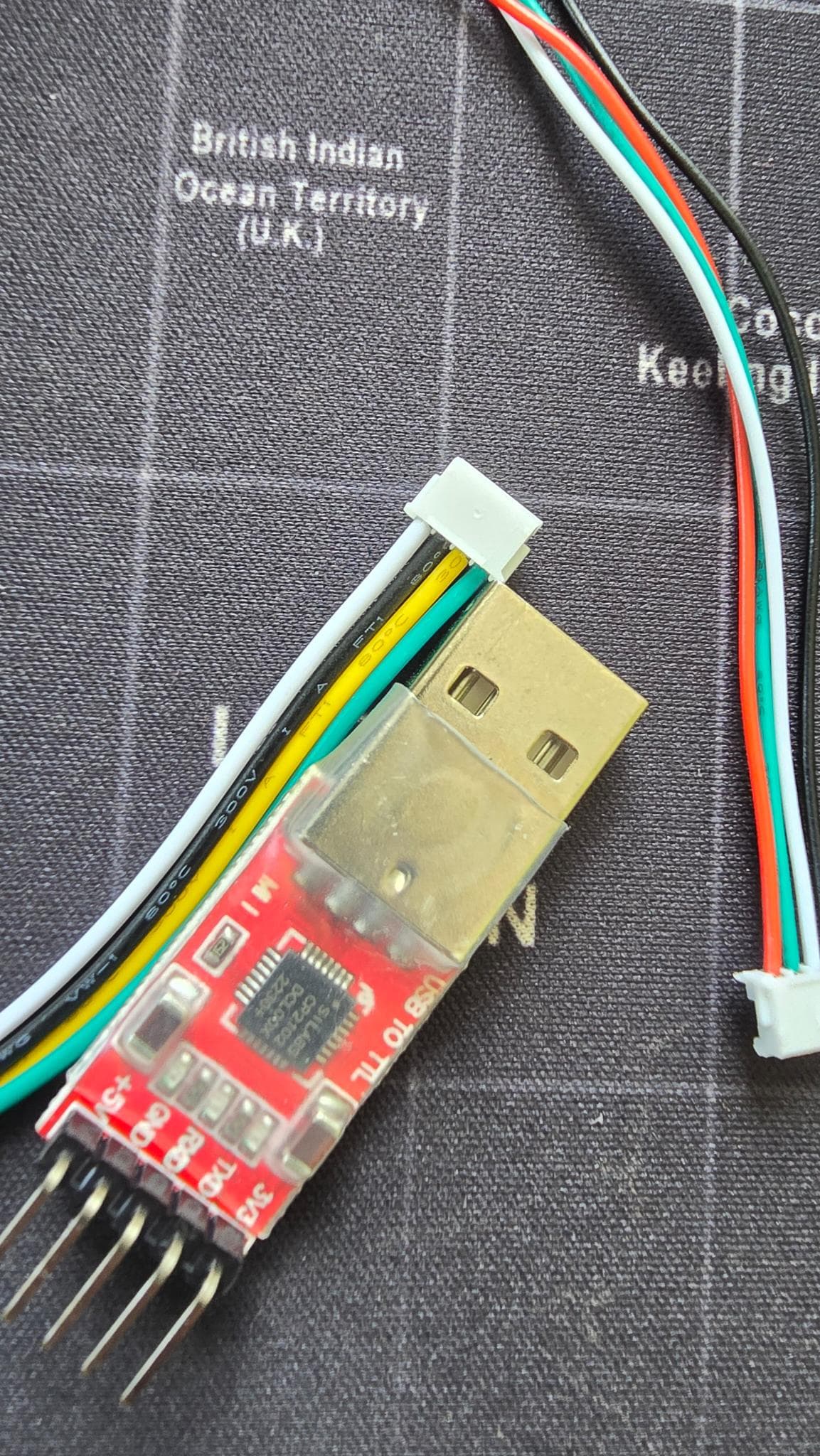
Hello, I recently bought a LD19+ / STL-27L lidar on Amazon. It arrived with two cables, one long (1 - >black, 2 → white, 3 → green and 4 → red) and a short one (white, black, yellow, green). I also received a USB to USART adapter CP2102 with 5 pins (+5V, GND, RXD, TXD, 3V3). I attached a picture of the wires and adapter.
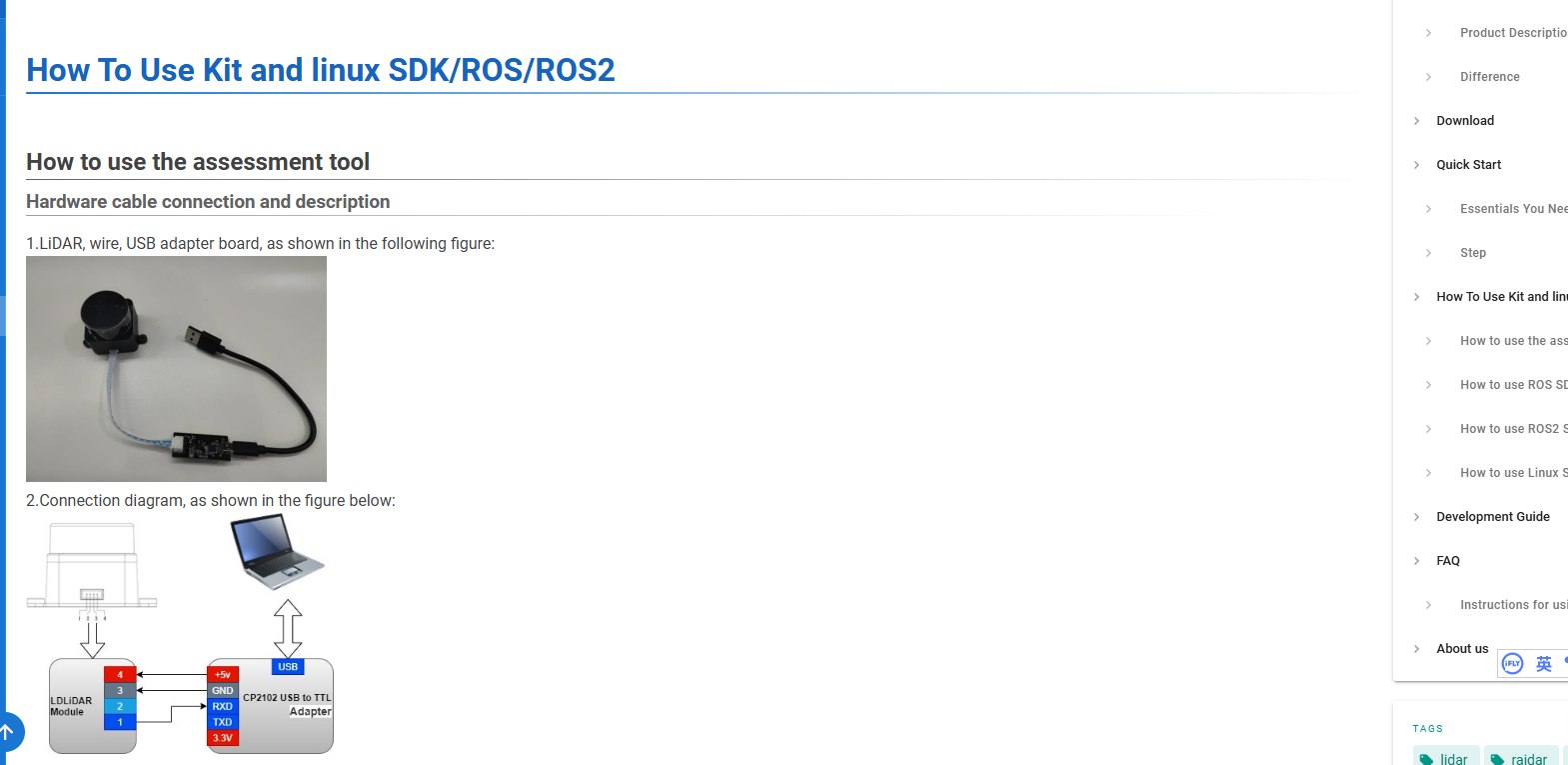
Before I try to connect and risk damaging something, I have a simple question: What wire goes where? I looked everywhere on the wiki and I cannot find any useful information .
Thank you for your help in that matter.